جریان مرز متحرک، مدل شبکه پویا در فلوئنت- بخش۱۳
۵- مشاهده حرکت جسم در صورتی که حرکت جسم از پیش تعیینشده باشد و وابسته به شبیهسازی در گامهای زمانی بعدی نباشد.
این بخش اختیاری بوده و برای انجام شبیهسازی ضروری نیست.
نمونهای از مسیرهای تابع حل که پیش از انجام شبیهسازی قابل مشاهده نیستند، ردیابی جسم رهاشده با مدل شش درجه آزادی (Six Degree of Freedom) است.
Define ——> Dynamic Mesh ——> Preview Mesh Motion
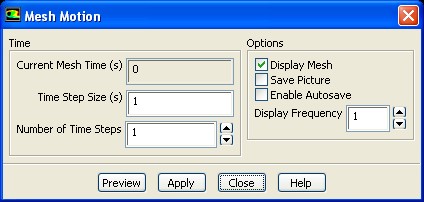
شکل ۲۶- مرور حرکت شبکه پیش از شروع شبیهسازی
۶- تعیین رویدادهای مورد نظر در گامهای زمانی مختلف (مانند تغییر نوع برخی مرزها و یا فعالسازی و یا غیرفعالسازی یک منطقه از شبیهسازی)
Define ——> Dynamic mesh ——> Events
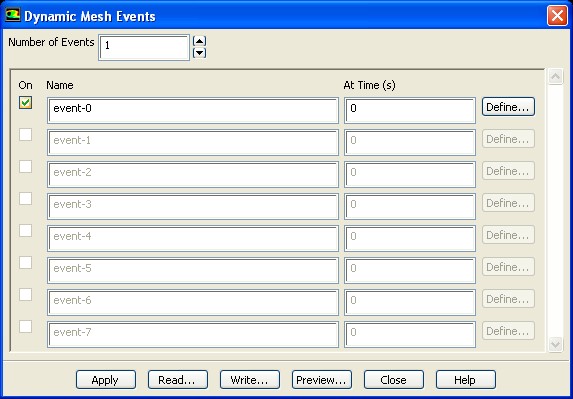
شکل ۲۷- فعالسازی رویدادهای حل در مدل Dynamic Mesh
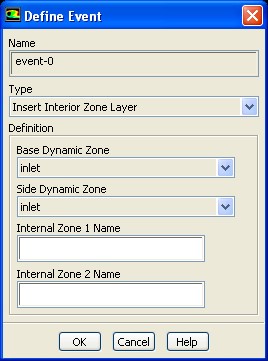
شکل ۲۸- تعریف رویداد تغییر نوع مرز
۷- ذخیره فایل های Case و Data
File ——> Write ——> Case & Data
۸- تعیین کوپل بین سرعت و فشار با استفاده از متد PISO (در شبیهسازیهای وابسته به زمان PISO روشی مناسب برای کوپل بین سرعت و فشار است و در صورتی که مشکلات حافظه وجود ندارد میتوان از روش Coupled نیز استفاده نمود که در مقایسه با روش PISO حتی در شبیهسازیهای وابسته به زمان، سرعت همگرایی بالاتری دارد.)
Solve ——> Methods
۹- تعیین تنظیمات ذخیره خودکار فایل های Case و Data در گامهای زمانی میانی (به دلیل تغییرات در شبکه و نتایج حل، در هر گام زمانی دلخواه، میبایست دو فایل case و data ذخیره شوند.)
File ——> Write ——> Autosave
۱۰- تعریف انیمیشن شبکه و حل در صورت نیاز
Solve ——> Calculation Activities ——> Solution Animations ——> Create Edit
نویسنده: آقای مهندس احسان سعادتی
برای مشاهده رزومه مدرس کلیک کنید